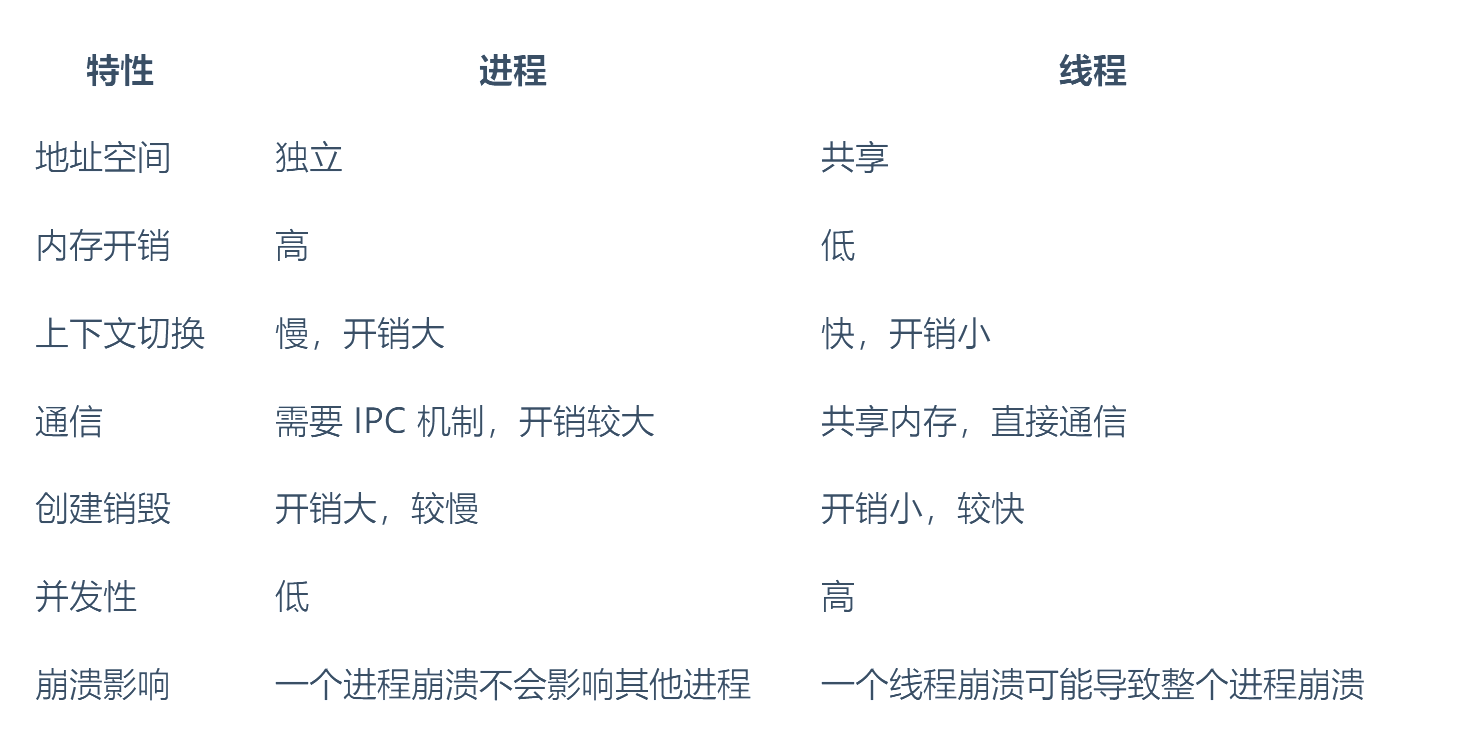
进程和线程
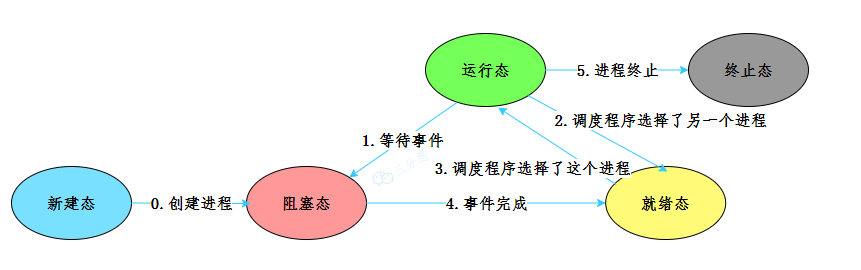
进程状态
僵尸进程与孤儿进程
僵尸进程是已完成且处于终止状态,但在进程表中却仍然存在的进程。
僵尸进程一般发生有父子关系的进程中,一个子进程的进程描述符在子进程退出时不会释放,只有当父进程通过 wait() 或 waitpid() 获取了子进程信息后才会释放。如果子进程退出,而父进程并没有调用 wait() 或 waitpid(),那么子进程的进程描述符仍然保存在系统中
孤儿进程:一个父进程退出,而它的一个或多个子进程还在运行,那么这些子进程将成为孤儿进程。孤儿进程将被 init 进程 (进程 ID 为 1 的进程) 所收养,并由 init 进程对它们完成状态收集工作。因为孤儿进程会被 init 进程收养,所以孤儿进程不会对系统造成危害。
进程间通信
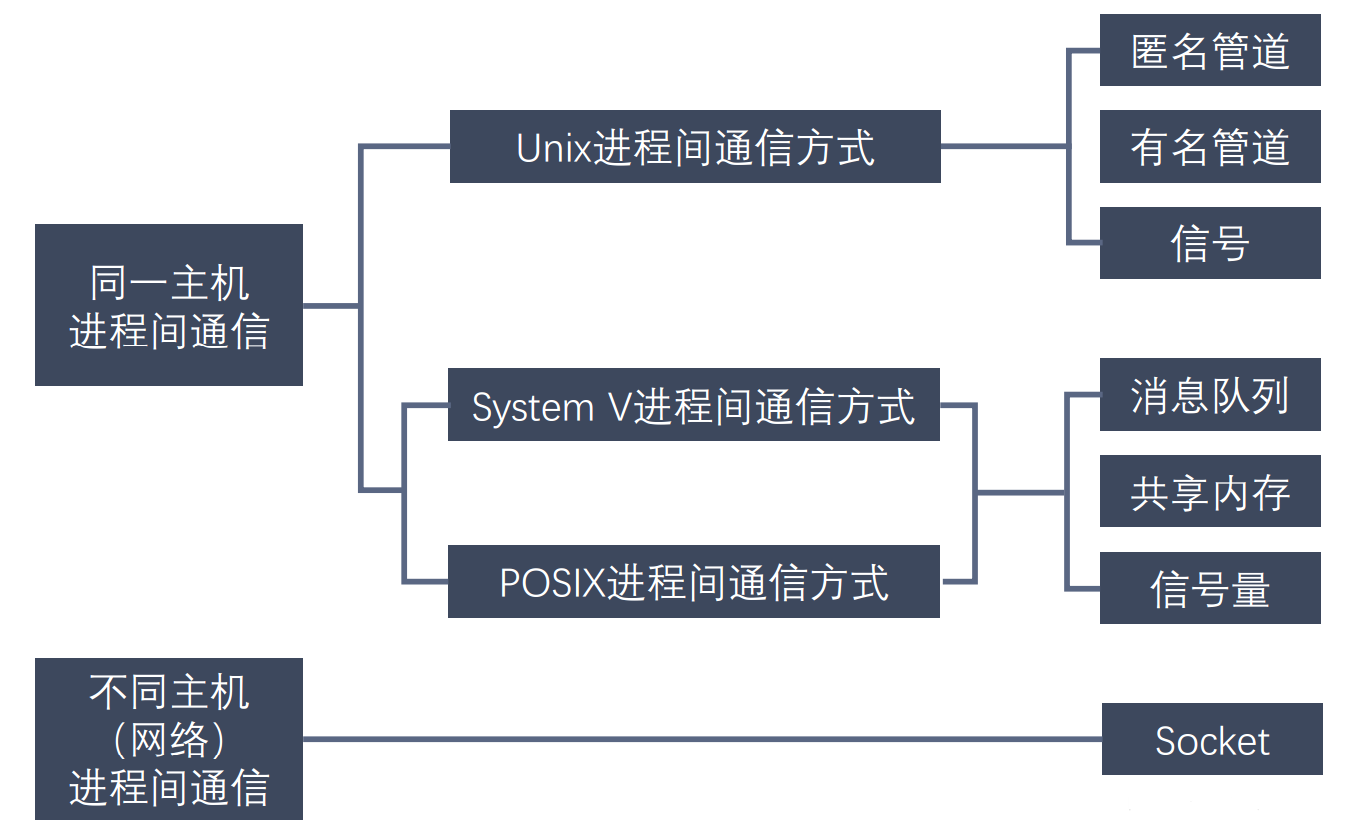
进程间通信是指在操作系统中,多个进程之间为了完成任务需要进行数据交换或协同工作的技术
常见的方式有:
1、管道Pipe
进程间的管道就是内核中的一串缓存,从管道的一端写入数据,另一端读取。数据
只能单向流动,遵循先进先出的原则
管道效率低,不适合进程间频繁地交换数据
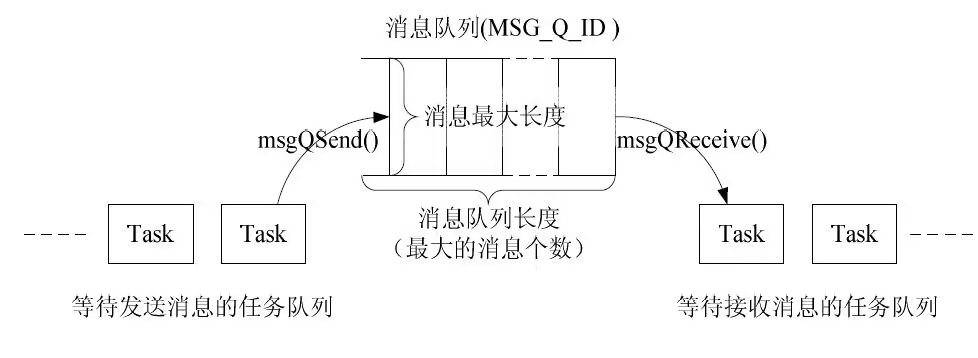
2、消息队列
消息队列是保存在内核中的消息链表,按照消息的类型进行消息传递,具有较高的可靠性和稳定性
缺点:消息体有一个最大长度的限制,不适合比较大的数据传输;存在用户态与内核态之间的数据拷贝开销
3、共享内存(是最快的进程间通信方式)
为了防止数据竞争,需要配合其他同步机制,如信号量或互斥锁
4、信号量
是一种同步机制,可以用于进程间的写作与同步
本质上是一个计数器,用来控制对共享资源的访问数量
它常作为一种锁机制,防止某进程正在访问共享资源时,其他进程也访问该资源
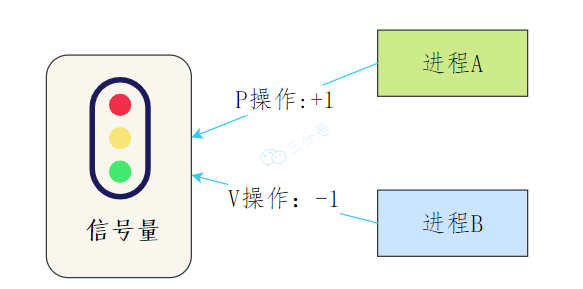
控制信号量的方式有两种原子操作:
P操作(wait,减操作),当进程希望获取资源时,它会执行P操作。如果信号量的值大于0,表示有资源可用,信号量的值减1,进程继续执行。如果信号量的值为0,表示没有可用资源,进程进入等待状态,知道信号量的值变为大于0
V操作(signal,加操作),当进程释放资源时,它会执行V操作,信号量的值加1。如果有其他进程因为等待该资源而被阻塞,这时会唤醒其中一个进程
5、信号
是一种比较简单的通信方式,用于通知进程某些事件的发生,通常用于中断进程的执行,或者进程之间传递一些控制信息
6、套接字socket
7、内存映射Memory-Mapped Files
通过将一个文件映射到进程的地址空间中,多个进程可以通过映射到同一文件的方式来共享数据
8、消息缓冲区
9、文件系统
通过读写同一文件来实现通信
10、远程过程调用RPC
允许进程通过调用远程进程的函数来实现通信,抽象出通信细节,让进程之间的通信看起来像是本地函数调用
总结:
管道和消息队列适合简单的数据传输。共享内存适合大量数据的快速交换,但需要同步机制保证一致性。信号量适合同步和协调进程操作。套接字则适合分布式系统或需要网络通信的场景。
进程调度策略
先来先服务FCFS,First-Come First-Served
按照进程到达的先后顺序进行调度,先到的进程先执行,直到该进程结束或阻塞后,再调度下一个进程
优点:实现简单,容易理解
缺点:不能有效处理长短作业混合的情况,容易导致长作业占用资源过多,从而引发饥饿问题(短作业等待过长)
短作业优先SJF,Shortest Job First
每次调度优先选择预计运行时间最短的进程进行执行
优点:能够最小化平均等待时间,适合短作业密集的场景
缺点:难以准确预测作业长度,且可能导致长作业饥饿问题
最高相应比优先调度HRRN,Highest Response Ratio Next
综合考虑等待时间和作业长度,优先调度响应比最高的进程,响应比计算公式为:(等待时间+运行时间)/运行时间
优点:避免了饥饿问题,兼顾长短作业,动态调整进程优先级
缺点:实现较为复杂,适用场景相对有限
时间片轮转调度RR,Round Robin
将CPU时间片分成固定长度的时间片,每个进程在一个时间片内执行。时间片到期后,如果进程未完成,则放到队列尾部,等待下一轮调度
优点:对所有进程公平,适合交互式系统,确保每个进程都能得到处理
缺点:如果时间片过长,可能退化为FCFS;如果时间片过短,则调度开销增加,影响系统效率
优先级调度Priority Scheduling
根据进程的优先级进行调度,优先级高的进程先执行。优先级可以是静态的,也可以动态变化。
优点:灵活性高,可以满足不同进程的响应需求
缺点:可能会导致优先级反转(低优先级的进程长期等待),从而引发饥饿问题
多级反馈队列Multilevel Feedback Queue
多个调度队列,每个队列有不同的优先级和时间片,进程可以根据其执行时间和响应情况在不同队列之间动态调整。例如,刚到达的进程进入高优先级队列,如果适用的CPU时间过多,则逐渐降到低优先级队列
优点:兼顾短作业和长作业的需求,对交互式和批处理系统都有较好表现
缺点:实现复杂,调优难度大
抢占式调度Preemptive Scheduling
运行操作系统在某些条件下中断当前进程的执行,并将CPU分配给另一个进程,这种调度策略可以和其他调度算法结合适用,例如优先级调度和时间片轮转调度
优点:可以更好地响应高优先级进程,确保系统的实时性
缺点:增加了调度开销,可能影响系统效率
实时调度Real-Time Scheduling
用于实时系统,要求进程必须在严格的时间限制内完成,分为硬实时(必须在截至时间内完成)和软实时(尽量在截至时间内完成)
优点:能够满足关键任务的时间约束
缺点:调度复杂,通常需要硬件和软件的支持
线程间同步
同步解决的是多线程操作共享资源的问题,不管线程之间是如何穿插执行的,最后的结果都是正确的。
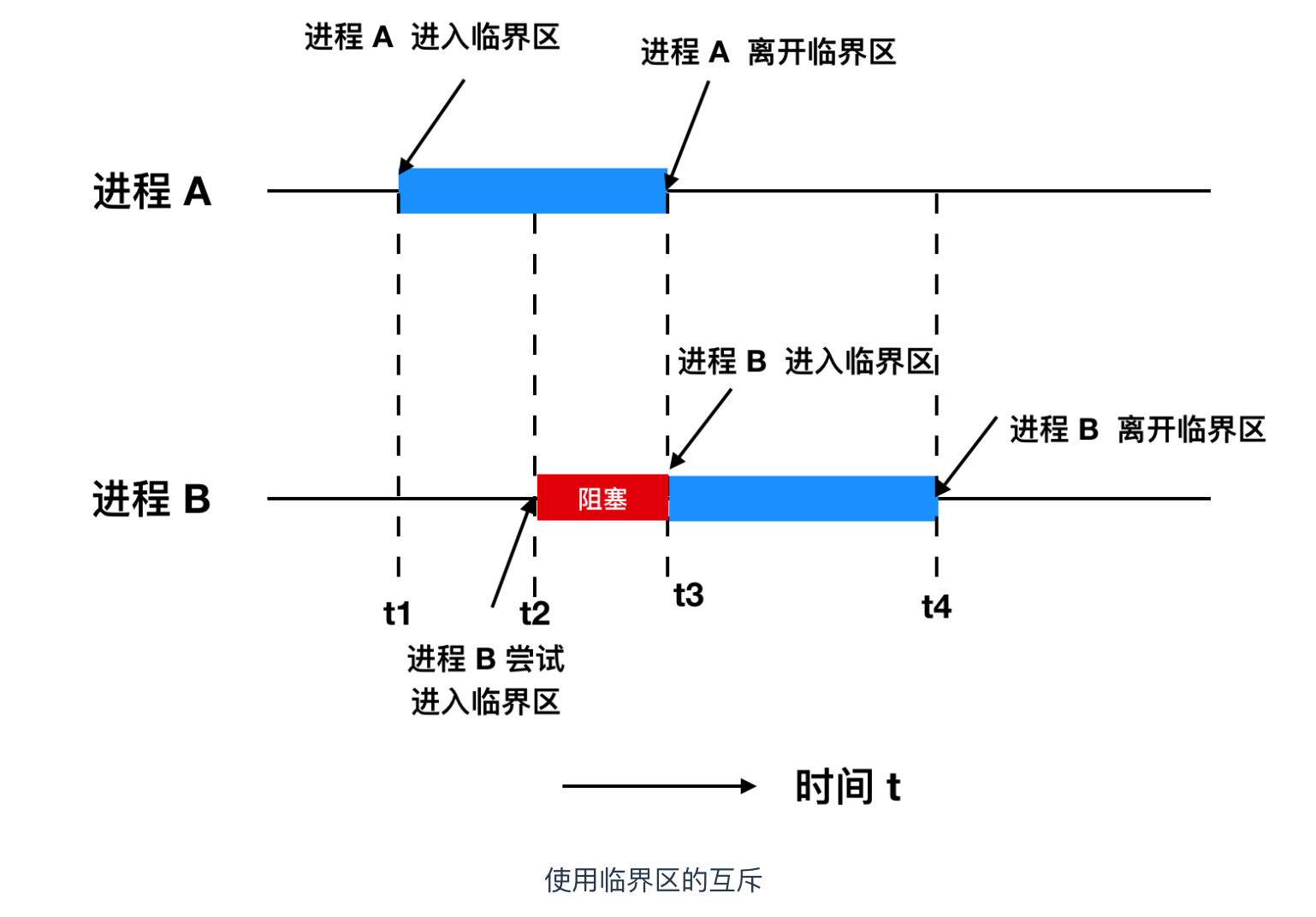
临界区的概念:对共享资源访问的程序片段,希望这段代码是互斥的,可以保证在某个时刻只能被一个线程执行,也就是说一个线程在临界区执行时,其他线程应该被阻止进入临界区
临界区不仅针对线程,同样针对进程
互斥锁
忙等待锁(也成为自旋锁,Spinlock)是指当一个线程试图获取锁时,如果该锁已经被其他线程持有,当前线程不会立即进入休眠或阻塞,而是不断地检查锁的状态,直到该锁可用为止。这个过程被称为忙等待,因为线程在等待锁时仍然占用CPU资源,处于活跃状态。优点是避免了线程的上下文切换。
无忙等待锁是指当一个线程尝试获取锁时,如果锁已经被其他线程持有,当前线程不会忙等待,而是主动让出CPU,进入阻塞状态或休眠状态,等待锁释放,当锁被释放时,线程被唤醒并重新尝试获取锁,这类锁的主要目的是避免忙等待带来的CPU资源浪费
信号量
通常表示资源的数量,对应的变量是⼀个整型(sem)变量。
两个原子操作的系统调用函数来控制信号量:
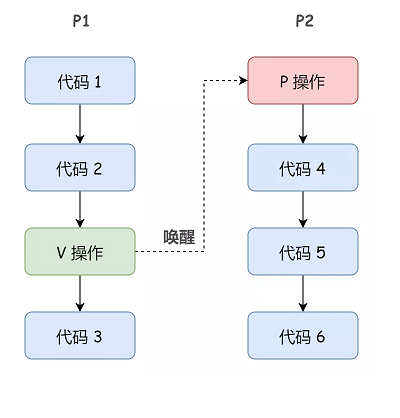
P 操作:当线程想要进入临界区时,会尝试执行 P 操作。如果信号量的值大于 0,信号量值减 1,线程可以进入临界区;否则,线程会被阻塞,直到信号量大于 0。
V 操作:当线程退出临界区时,执行 V 操作,信号量的值加 1,释放一个被阻塞的线程。
进程线程区别总结